Actuation and Detection
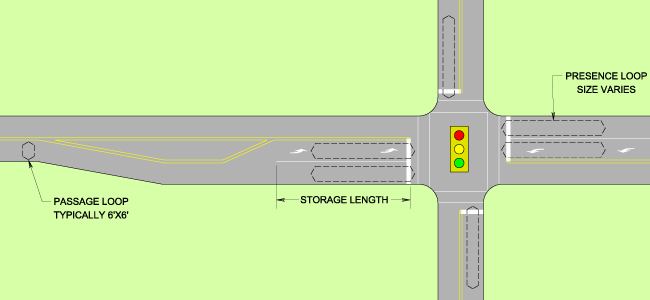
Actuated signals should generally be used because they are more efficient than pretimed signals. They should especially be used where there are low, fluctuating, or imbalanced traffic volumes; high side-street volumes and delays only during the peak hours; or if the signal was warranted based on non-traffic volume warrants. Actuation is accomplished through the use of loop or video detectors to detect the presence of vehicles. Loop detectors take two forms, presence and passage. Presence sensors detect slow moving and stopped vehicles. Passage (motion-detecting) sensors detect vehicles moving faster than 3 to 5 mph. Video detection can be considered for locations where loop actuation is not feasible, such as on bridges located adjacent to traffic signals, where pavement condition is not ideal, in temporary traffic control locations where lanes are being relocated as part of road work, or where pavement is prone to rutting due to significant truck travel. Video detection is permanent versus loops which require replacement periodically such as when a roadway is resurfaced.

Presence loop detectors recognize that a lane is occupied and call that approach's phase. Passage loop detectors are used to detect vehicles upstream from a signalized intersection and extend the green phase for those vehicles. Video detectors are cameras located on the mast arms or signal poles that look down to the roadway surface to the video detection zone. When a vehicle occupies the video detection zone, the camera sends a call to the controller, similar to how a loop sends a call to a controller. Video detectors require periodic cleaning, approximately annually, due to buildup of road dirt and even spider nests. Radar is also an option for detection, which requires less maintenance.